U4 non ti serve a meno che tu non voglia implementare il controllo via RS232 per il quale o ti scrivi il software o usi quello che ho scritto io e che ti posso mandare, comunque l'integrato è un MAX232.
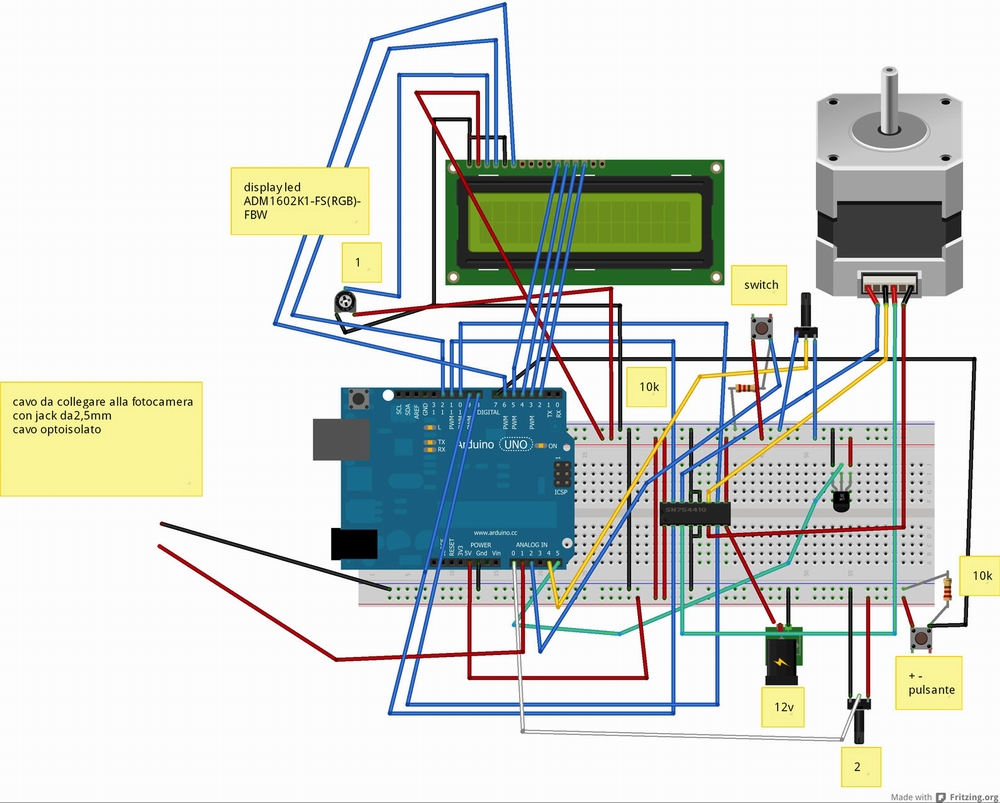
Ti riporto quello che avevo scritto in precedenza e che dovresti far arrivare al tuo amico elettronico: "Dal mio schema devi tirare via tutti i componenti passivi ( resistenze, condensatori, diodi ) collegati a U1 e U4, devi poi eliminare U1 e U4, devi eliminare S1 e le relative resistenze collegate e devi eliminare J4."
Cioè rimane lo schedino di pilotaggio U3 ed il 7805.
I condensatori, eliminando U1 e U4, rimangono C1 che è un 100nF poliestere ma che si può eliminare perchè serve solo per tagliare spike ad alta frequenza che disturbano U1 ( ma se non c'è U1 non serve nemmeno c1 ), e C5 che è un 47 uF quindi necessariamente un elettrolitico, va bene anche un 16V se alimenti il tutto a 12V.
Se gli avvolgimenti hanno 20 ohm, allora la corrente dovrebbe stare sui 600 mA per cui alimentarlo a 12V con quell'ibrido (U3) secondo me va bene. Sono 7,2 Watt e a spanne è una potenza che quel tipo di motorino può dissipare senza problemi.
Per semplificare al massimo ti do un'altro suggerimento. Dimentica lo schema e tutto il resto.
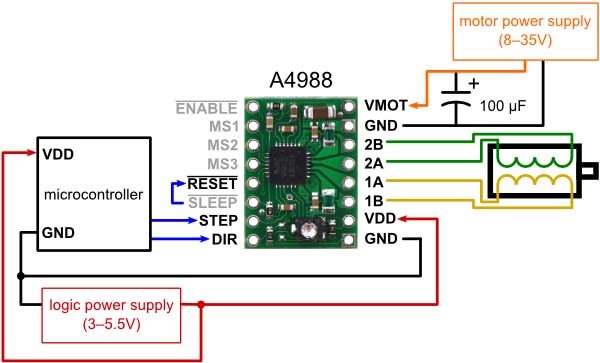
Secondo me al tuo amico elettronico viene meglio guardare lo schema che trova sul sito che ho linkato un pò di messaggi relativo allo schedino di pilotaggio
http://www.pololu.com/product/1182
. Lì trova tutte le info. In più dovrà aggiungere solo il 7805, che per uno che smanetta con l'elettronica è una cosa banale, per derivare i 5Volt dai 12 di alimentazione.


 questo è il terzo prototipo dell'astroinseguitore. In plexiglass che fa figo
questo è il terzo prototipo dell'astroinseguitore. In plexiglass che fa figo 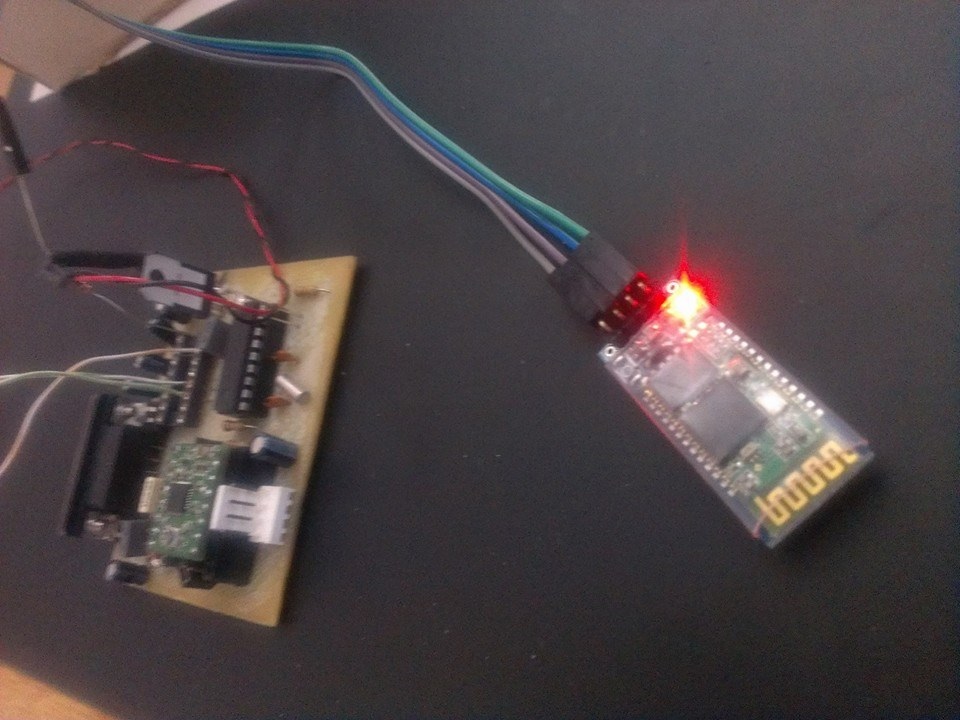 QUi si vede la scheda che ho segnalato a Geppo più una serie di altri componenti tra cui un modulo wireless per comandare l'astroinseguitore sia da PC che da smartphone Android
QUi si vede la scheda che ho segnalato a Geppo più una serie di altri componenti tra cui un modulo wireless per comandare l'astroinseguitore sia da PC che da smartphone Android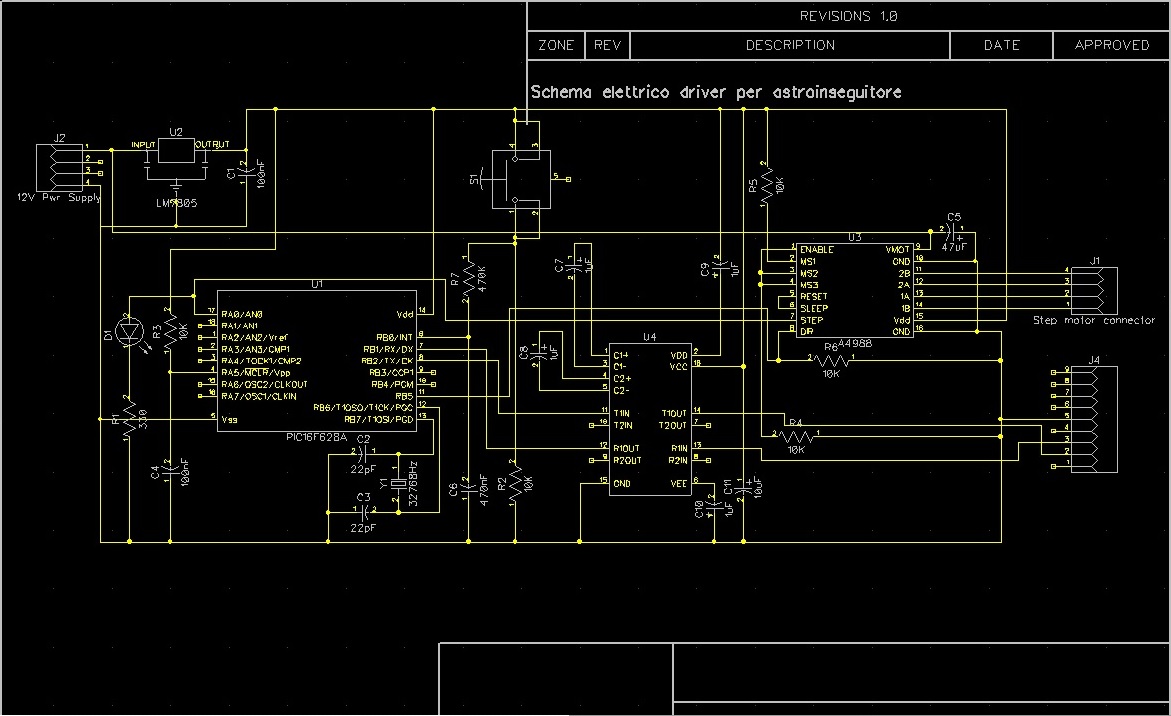







{kind=link}